|
Организация асинхронного последовательного обмена данными с внешним устройством осложняется тем, что на передающей и приемной стороне последовательной линии связи используются настроенные на одну частоту, но физически разные генераторы тактовых импульсов и, следовательно, общая синхронизация отсутствует. Рассмотрим на примерах организацию контроллеров последовательных интерфейсов для последовательных асинхронных передачи и приема данных.
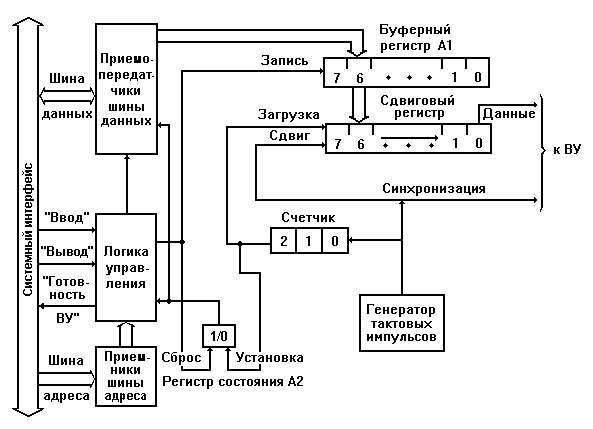
Простейший контроллер для асинхронной передачи данных в ВУ по последовательной линии связи представлен на рис. 3.8. Он предназначен для передачи данных в формате с двумя стоповыми битами.
Рис. 3.8. Контроллер последовательной асинхронной передачи.
После передачи очередного байта данных в регистр состояния А2 записывается 1. Единичный выходной сигнал регистра А2 информирует процессор о готовности контроллера к приему следующего байта данных и передаче его по линии связи в ВУ. Этот же сигнал запрещает формирование импульсов со схемы выработки импульсов сдвига - делителя частоты сигналов тактового генератора на 16. Счетчик импульсов сдвига (счетчик по mod 10) находится в нулевом состоянии и его единичный выходной сигнал поступает на вентиль И, подготавливая цепь выработки сигнала загрузки сдвигового регистра.
Процесс передачи байта данных начинается с того, что процессор, выполняя команду "Вывод", выставляет этот байт на шине данных. Одновременно процессор формирует управляющий сигнал системного интерфейса "Вывод", по которому производятся запись передаваемого байта в буферный регистр А1, сброс регистра состояния А2 и формирование на вентиле И сигнала "Загрузка". Передаваемый байт переписывается в разряды 1, ... , 8 сдвигового регистра, в нулевой разряд сдвигового регистра записывается 0 (стартовый бит), а в разряды 9 и 10 - 1 (стоповые биты). Кроме того, снимается сигнал "Сброс" с делителя частоты, он начинает накапливать импульсы генератора тактовой частоты и в момент приема шестнадцатого тактового импульса вырабатывает импульс сдвига.
На выходной линии контроллера "Данные" поддерживается состояние 0 (значение стартового бита) до тех пор, пока не будет выработан первый импульс сдвига. Импульс сдвига изменит состояние счетчика импульсов сдвига и перепишет в нулевой разряд сдвигового регистра первый информационный бит передаваемого байта данных. Состояние, соответствующее значению этого бита, будет поддерживаться на линии "Данные" до следующего импульса сдвига.
Аналогично будут переданы остальные информационные биты, первый стоповый бит и, наконец, второй стоповый бит, при передаче которого счетчик импульсов сдвига снова установится в нулевое состояние. Это приведет к записи 1 в регистр состояния А2. Единичный сигнал с выхода регистра А2 запретит формирование импульсов сдвига, а также информирует процессор о готовности к приему нового байта данных. После завершения передачи очередного кадра (стартового бита, информационного байта и двух стоповых бит) контроллер поддерживает в линии связи уровень логической единицы (значение второго стопового бита).
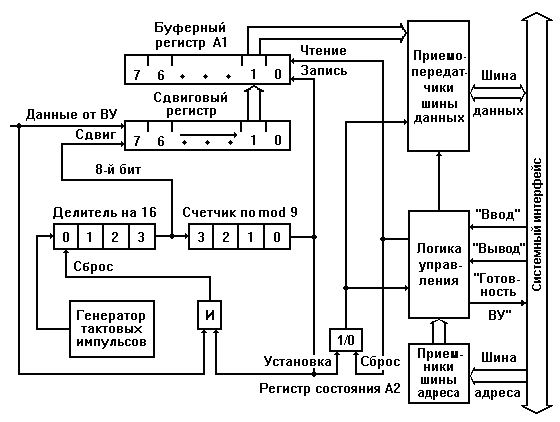
Рис. 3.9. Контроллер последовательного асинхронного приема.
Уровень логической единицы поступает по линии "Данные" в контроллер для асинхронного приема данных (рис. 3.9). Этот уровень создает условия для выработки сигнала, запрещающего работу делителя частоты генератора тактовых импульсов. Действительно, после приема предыдущего байта данных счетчик импульсов сдвига (счетчик по mod 9) находится в нулевом состоянии и на вентиль И поступают два единичных сигнала: со счетчика сдвигов и из линии "Данные". На выходе вентиля И вырабатывается сигнал сброса делителя частоты сигналов тактового генератора, запрещающий формирование импульсов сдвига.
В момент смены стопового бита на стартовый бит (момент начала передачи нового кадра) на линии "Данные" появится уровень логического нуля и тем самым будет снят сигнал сброса с делителя частоты. Состояние 4-разрядного двоичного счетчика (делителя частоты) начнет изменяться. Когда на счетчике накопится значение 8, он выдаст сигнал, поступающий на входы сдвигового регистра и счетчика импульсов сдвига. Так как частота сигналов генератора тактовых импульсов приемника должна совпадать с частотой генератора тактовых импульсов передатчика, то сдвиг (считывание) бита произойдет примерно на середине временного интервала, отведенного на передачу бита данных, т. е. времени, необходимого для выработки шестнадцати тактовых импульсов. Это делается для уменьшения вероятности ошибки из-за возможного различия частот генераторов передатчика и приемника, искажения формы передаваемых сигналов (переходные процессы) и т. п. Следующий сдвиг произойдет после прохождения шестнадцати тактовых импульсов, т. е. на середине временного интервала передачи первого информационного бита.
При приеме в сдвиговый регистр девятого бита кадра (восьмого информационного бита) из него "выдвинется" стартовый бит и, следовательно, в сдвиговом регистре будет размещен весь принятый байт информации. В этот момент счетчик импульсов сдвига придет в нулевое состояние и на его выходе будет выработан единичный сигнал, по которому содержимое сдвигового регистра перепишется в буферный регистр, в регистр состояния А2 запишется 1 и он будет информировать процессор об окончании приема очередного байта, вентиль И подготовится к выработке сигнала "Сброс" (этот сигнал сформируется после прихода первого стопового бита).
Получив сигнал готовности (1 в регистре А2), процессор выполнит команду "Ввод" (см. пример 2.2 Параллельной передачи данных). При этом вырабатывается управляющий сигнал системного интерфейса "Ввод", по которому производятся пересылка принятого байта данных из буферного регистра в процессор (сигнал "Чтение") и сброс регистра состояния А2.
Отметим, что для простоты изложения в контроллере на рис. 14 не показаны схемы контроля стоповых бит принимаемого кадра. Не показаны также схемы контроля четности или нечетности (паритета) передаваемой информации (обычно в передаваемом байте восьмому биту придается значение 0 или 1, так чтобы в этом байте было четное количество единиц). В реальных контроллерах имеются такие схемы, и если контроллер не принимает из линии связи нужного количества стоповых бит или вырабатывается сигнал ошибки паритета в схеме контроля четности, то принятые в текущем кадре биты данных игнорируются и контроллер ожидает поступления нового стартового бита.
Обмен данными с ВУ по последовательным линиям связи широко используется в микроЭВМ, особенно в тех случаях, когда не требуется высокой скорости обмена. Вместе с тем применение в них последовательных линий связи с ВУ обусловлено двумя важными причинами. Во-первых, последовательные линии связи просты по своей организации: два провода при симплексной и полудуплексной передаче и максимум четыре - при дуплексной. Во-вторых, в микроЭВМ используются внешние устройства, обмен с которыми необходимо вести в последовательном коде.
В современных микроЭВМ применяют, как правило, универсальные контроллеры для последовательного ВВ, обеспечивающие как синхронный, так и асинхронный режим обмена данными с ВУ.
|
.png)