|
В системы автоматического регулирования различают статический и динамический режимы работы. Они описываются с помощью статических, динамических, частотных характеристик, дифференциальных уравнений и передаточных функций. Статические, динамические, частотные характеристики, дифференциальные уравнения и передаточные функции представляют собой точные математические методы описания свойств систем. Словесное описание, в отличие от математических методов описания свойств систем, помогает понять принцип действия системы, ее назначение, особенности функционирования и т.д. Однако, что самое главное, оно не дает количественных оценок качества регулирования, поэтом непригодно для изучения характеристик систем и построения систем автоматизированного управления.
Статический анализ свойств АСР
Статическая характеристика элемента - называется зависимость установившихся значений выходной величины от значения величины на входе системы, т.е.:
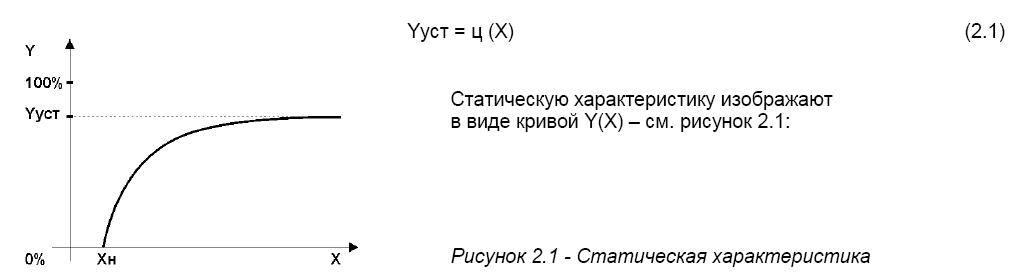
Установившийся режим (Yуст) - это режим, при котором расхождение между истинным значением регулируемой величины и ее заданным значением будет постоянным во времени.
Статический элемент- у которого при постоянном входном воздействии с течением времени устанавливается постоянная выходная величина. Например, при подаче на вход нагревателя различных значений напряжения он будетнагреваться до соответствующих этим напряжениям значений температуры.
Астатический элемент - у которого при постоянном входном воздействии сигнал на выходе непрерывно растет с постоянной скоростью, ускорением и т.д.
Линейный статический элемент - называется безинерционный элемент, обладающий линейной статической характеристикой вида:
Yуст = k*X + b (2.2)
Как видно из формулы (2.2), статическая характеристика элемента имеет вид прямой с коэффициентом наклона k и смещением характеристики b. Линейные статические характеристики, в отличие от нелинейных, более удобны для изучения благодаря своей простоте. Если модель обьекта нелинейна, то обычно ее преобразуют к линейному виду путем методалинеаризации.
Система управления называется статической, если при постоянном входном воздействии ошибка управления Е стремится к постоянному значению, зависящему от величины воздействия.
Система управления называется астатической, если при постоянном входном воздействии ошибка управления Е стремится к нулю вне зависимости от величины воздействия
Динамический анализ свойств АСР
Функциональные элементы, используемые в автоматических системах, могут иметь самые различные конструктивное исполнение и принципы действия. Однако общность математических выражений, связывающих входные и выходные величины различных функциональных элементов, позволяет выделить ограниченное число так называемых типовых динамических звеньев. Каждому типовому звену соответствует определенное математическое соотношение между входной и выходной величиной. Если это соотношение является элементарным (например, дифференцирование, умножение, интегрирование и т. д.), то и звено называется элементарным.
Звенья, которые описываются обыкновенными дифференциальными уравнениями первого и второго порядка, называются типовыми динамическими звеньями.
Типовые динамические звенья являются основными составными частями алгоритмических структур непрерывных систем управления, поэтому знание их характеристик облегчает анализ таких систем.
|
.png)